团队科研成果分享2022.10.31-2022.11.06标题: Underwater Pollution Tracking based on Software-Defined Multi-Tier E 2022-11-2 02:30:12 Author: 网络与安全实验室(查看原文) 阅读量:43 收藏
团队科研成果分享
2022.10.31-2022.11.06
标题: Underwater Pollution Tracking based on Software-Defined Multi-Tier Edge Computing in 6G-based Underwater Wireless Networks
期刊: IEEE Journal on Selected Areas in Communications
作者: Chuan Lin, Guangjie Han, Jinfang Jiang, Chao Li, Syed Bilal Hussain Shah, Qian Liu.
分享人: 河海大学——李飞燕
01
研究背景
BACKGROUND
研究背景
在已知的海洋污染中,水下扩散污染是最具破坏性的,因为它会对海洋造成不可预测的、长期的毁灭性影响,如海洋石油或放射性物质的泄漏。因此需要及时跟踪扩散轨迹或隔离/阻断扩散源,以免海洋污染扩散成为更严重的问题。
近年来,水下物联网(IoUTs)范式的出现,被认为是促进海洋可持续开发和利用的技术。新兴的6G网络有望实现空中-地面-水下一体的无线网络的愿景。可以预见,支持6G的IoUTs将在海洋牧场、智能海洋、海洋污染监测或跟踪等方面带来广泛的应用。例如,海洋扩散污染跟踪作为广受关注的应用场景之一,多个AUV或基于AUV集群的水下跟踪系统可以通过协同调度实现对水下扩散污染的调查跟踪。
近年来,为了实现可扩展的系统控制和精确的数据共享,AUV集群组网系统的概念被提出,被认为是水下数据采集和特定目标跟踪的未来发展方向。AUV集群组网系统能够提供多个AUV之间的协同组网能力,也面临着以下具有挑战性的问题:
1)目前的AUV集群组网系统是由水面上的无人水面舰艇(USV)统一协调的,这不能保证及时的网络控制。
2)基于传统网络架构的AUV集群组网系统配备了与网络数据平面高度耦合的分布式架构控制平面,这不能为整个网络提供一个全局视图来确定最优的策略。
3)基于群体的AUV组网系统实际上是一种移动水下自组织网络,网络特征(例如,网络拓扑结构)随时间变化,对网络状态的估计和预测比较困难。
02
关键技术
TECHNOLOGY
关键技术
软件定义网络(SDN)的出现为提高网络的可扩展性和可控性提供了可能。它可以将网络控制平面从网络数据转发平面集中分离出来,实现SDN控制器集中式管理网络。SDN控制器可以及时收集和共享网络信息,协调和指定网络组件。移动边缘计算(MEC)通过在终端设备附近的边缘部署轻量级边缘计算站,为网络提供及时的数据计算服务。受SDN技术的启发,本文利用SDN技术将AUV集群网络系统升级为SDN-AUVNs。利用SDN技术,可以实现SDN-AUVNs的透明、系统状态的集中收集和污染跟踪策略的高效部署。此外,为了提高网络控制效率和降低系统控制的容忍时延(由于SDN-AUVNS具有动态网络拓扑结构),在SDN-AUVNS中引入了多层MEC组件的概念,并在MEC站点上动态切换SDN控制器的角色,使SDN-AUVNS处于动态控制平面。
基于所提出的嵌入SDN和MEC技术的网络体系结构,本文提出了一种SDN-AUVNS水下污染智能跟踪策略。主要贡献如下:
1)基于SDN,提出了一种基于集群AUV的组网系统SDN-AUVNS。结合SDN-AUVNs的分层体系结构,引入多层MEC构建SDN-AUVNs的动态控制平面;
2)基于所提出的SDN-AUVNs,采用人工势场理论建立了AUV集群和基于AUV集群的水下跟踪模型,特别是针对特定浓度的水下污染等势线;
3)使用线性机制对SDN-AUVNs的控制输入进行优化和修正,提出了一种快速联合控制策略,用于调度SDN-AUVNs智能跟踪水下污染。
03
算法介绍
ALGORITHMS
算法介绍
1. SDN-AUVNS模型
为了实现智能化、集成化和可扩展性的水下污染跟踪,本文利用SDN技术来优化AUV集群组网系统的体系结构,并引入了分层MEC或多层边缘计算的思想,提出了一个具有动态网络控制平面的支持SDN的AUV群组网络系统(SDN-AUVNs)。如图1所示,SDN-AUVNS集成了以下三个功能层:
图1 基于6G的SDN-AUVNS架构
(1)网络层
SDN-AUVNS的网络层集成了一组具有多种水下跟踪/搜索功能的AUV。此外,本文假设所有的 AUV 都配备了侧扫和多波束声纳,并且可以利用回声探测技术估计水下污染的位置或浓度。除了水下污染跟踪或特定目标搜索外,SDN-AUVNS还提供AUV之间数据共享的能力,以实现分工和信息同步。例如,一些AUV负责执行跟踪任务,而一些AUV则致力于通过水声通信进行数据存储或中继。网络层的AUV仅用于水下作业目的,而不是用于决策。此外,在网络层,也可以采用基于光的水下通信来传输感知数据,特别是AUV之间的数据转发。
(2)控制层
SDN-AUVNS的控制层是动态网络控制层。所部署的用于制定决策的AUV,是基于MEC单元的SDN控制(简称MEC-C)。在SDN-AUVNS中,MEC-C 周期性地从其他 AUV 收集信息,或者普通 AUV 主动将其跟踪数据传输到 MEC-C,以便可以在 MEC-C 处集中确定追踪决策。MEC-C可以确定/选择位于AUV群的地理中心的AUV,并在下一个周期中执行MEC-C切换。此外,为了管理跨多个域的操作,即多个MEC-Cs协作执行一个共同任务,部署了基于全局MEC单元的SDN控制器 (MEC-G)。MEC-G旨在同步信息并为SDN-AUVNS中的所有正常AUV分配资源,从而引导所有AUV进行智能控制。
(3)应用层
在应用层,水下探索和跟踪策略(如AUV集群的控制、AUV集群与控制中心之间的数据中继、数据路由等。)由南向接口部署。
2. SDN-AUVNS的输入控制
为了跟踪污染区域,即未知区域污染物浓度的等势线 (浓度分布函数不确定),本文提出了以下步骤来确定合作控制策略: 1) 估计污染区域的检测场的梯度;2) 遵循AUV集群模型继续前进; 3) 将SDN-AUVNS调整到具有相同污染物浓度值的方向;4) 当检测到目标浓度时,保持SDN-AUVNS沿污染物浓度的等势线移动。
在时间 t,测量浓度值(由 AUV i 在位置 si(t) 处检测)和测量值(由 i 的邻居 j ∈ Ni 收集)的平均值可以通过以下方式计算:
其中|Ni|是i的邻居的数量,z(si(t)) 和z(sj(t)) 分别是AUV i和j测得的浓度值。
为了优化检测到的浓度值或减小测量误差,文中提出了一种名为 “距离倒数加权” 的方法。“距离倒数加权”方法可以描述为:两个相邻的 AUV 越接近(在位置上),它们检测到的浓度值越相似,自然相关性高于远处的 AUV;相反,与距离远AUV的相似性和相关性较低。用于估计浓度值的距离倒数加权可以表示为:
其中P表示根据距离倒数加权计算的加权和,可以表示为:
其中,dis表示AUV i与其邻居j之间的距离。通过使用距离倒数加权方法,可以减少从远离MEC-C的AUV收集的浓度值的影响,从而获得由多个AUV估计的更准确的浓度值。
图2 法向量和切向量
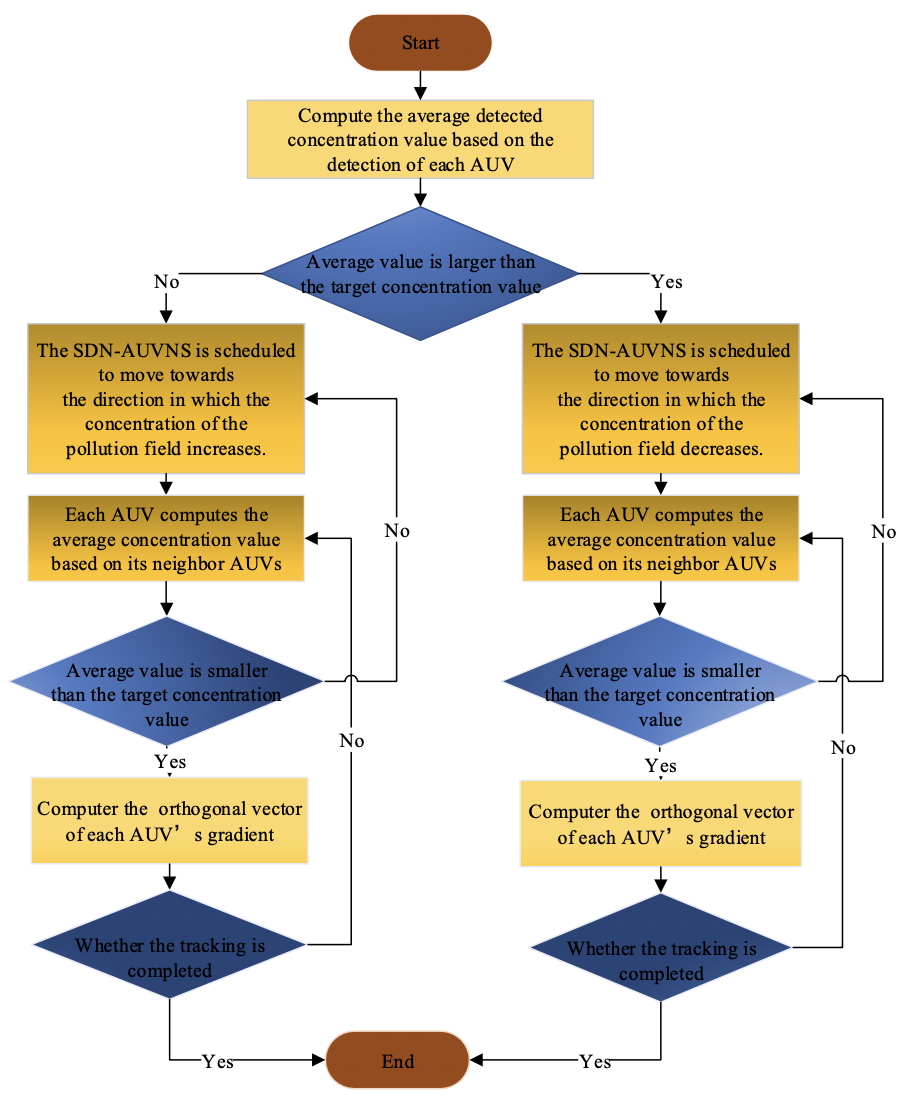
如果SDN-AUVNS到达指定浓度的场,则sdn-auvns沿着等势线巡航,即梯度矢量的正交矢量巡航;否则,将重新调整AUV集群朝着平均梯度矢量的方向航行,即浓度场的中心位置,如图2所示。对于给定的污染区域,SDN-AUVNS对检测到的浓度指进行修正,对输入控制有以下两种情况:
(1)第一种情况:如果SDN-AUVNS检测的浓度小于目标浓度,AUV被指定向污染场的中心巡航,直到SDN-AUVNS检测的浓度大于目标浓度。
(2)第二种情况:如果SDN-AUVNS检测的浓度大于目标浓度,SDN-AUVNs应安排向污染场浓度降低的方向移动,直到SDN-AUVNS检测的浓度小于目标浓度。
3. 联合控制策略
图3 联合控制算法示意图
联合控制算法是对特定的水下污染场进行规定浓度的等位线跟踪,仅在跟踪到目标浓度值等位线时停止。在MEC-C中,对于每个AUV,基于每自身及其邻居的检测值估算浓度值,根据目标浓度和SDN-AUVNS在初始位置的检测值,总共有两种情况来设置控制输Fi(t)。
(1)情况1:如果所估算的浓度值大于目标浓度,AUV的输入控制为
SDN-AUVNS调整为向污染区域浓度降低的方向移动,此时输入控制为
(2)情况2:如果所估算的浓度值小于目标浓度,AUV的输入控制为
SDN-AUVNS被安排向污染区域浓度增加的方向移动,此时输入控制为
在上述AUV的输入控制中,第一部分是基于势场的梯度,该梯度被指定为保持AUV集群并同时避免碰撞;第二部分是速度匹配旨在使SDN-AUVNS中每个AUV的速度统一;最后一部分是用于跟踪等势线的导航反馈。
04
实验结果
EXPERIMENTS
实验结果
本文进行了二维的水下污染扩散跟踪(10m×10m)模拟实验,模拟实验参数如表Ⅰ所示。
表Ⅰ 参数设置
1. 可用性测试
图 4a显示了基于SDN-AUVNS的水下污染跟踪的初始阶段。MEC-C是标号为4的AUV。从图4中可以看出关键阶段是第7阶段,在阶段7中,SDN-AUVNS的MEC-C注意到检测到的浓度值大于目标浓度值4。因此,SDN-AUVNs的速度被调整/转向浓度降低的方向,这个阶段一直保持到第8阶段。在第8阶段,如图所示 4h,SDN-AUVNS探测目标浓度值并沿目标等位线巡航。之后,SDN-AUVNS继续跟踪目标等位线。从图4a至图 4i显示的结果可以证明文中提出的算法可以跟踪特定浓度的水下污染。
图4 可行性测试
2. 可扩展性测试
如图所示 5a至图 5i,有三个扩散源,图中为使用SDN-AUVNs在三维场景中跟踪浓度为4的等势线。此外,除污染区域的规模和SDN-AUVNs的初始位置外,所有参数均如表Ⅰ所示。即使SDN-AUVNs需要较长的时间来跟踪目标浓度,最终都能跟踪目标等势线。总体而言,图4和图5的评估结果可以证明文中提出的算法是可扩展的,对于多种应用场景是可行的。
图5 在三维场景下的可扩展性测试
3. 检测误差和控制延迟的测试
本文中提到的检测误差是指由公式计算出来的浓度值与目标浓度值4之间的误差。图6a中给出了在不同SDN-AUVNS的规模时的测试误差结果 (即n分别指定为3,5,8,10和12)。在1000时隙之前,误差非常大 (即图6a中的结果的绝对值)。这是因为SDN-AUVNS从范围从0 m到2m的位置开始追踪。图6a中的极值点表示图4f所示的阶段,其中由SDN-AUVNS检测到的浓度值大于目标浓度值并且将其检测/巡航转向浓度降低的方向。从图6可以看到误差在1200时隙之后易于稳定。这表明本文提出的跟踪方法是精确且稳定的。此外,可以得出n的值越大,误差越早稳定。这表明大型SDN-AUVNS可以促进水下污染跟踪。
当SDN-AUVNS跟踪等势线时,计算每个AUV的平均检测误差,如图6所示 (AUV从AUV 1- AUV 8)。图6b测试一下结果与图4中的测试结果相似。开始时误差较大。当检测到目标等势线时,误差稳定。然而,从图8b中可以看到,当SDN-AUVNS以大幅度(例如,图6h中的阶段8) 转动时,误差也变大。
此外,本文还将距离倒数加权方法与基于正常平均样本的方法 (由ASA命名) 的检测误差进行了比较。如图6c所示的结果,距离倒数加权方法比ASA方法性能更好。
(a)不同规模的SDN-AUVNS的平均检测误差
(b)SDN-AUVNS中每个AUV的平均检测误差
(c)不同方法的平均检测误差
图6 检测误差测试
此外,本文还进行了控制延迟测试,如图7所示。控制延迟定义为SDN-AUVNS中MEC-C和AUV之间的传播延迟,这与SDN-AUVNS中MEC-C和AUV之间的距离有关。本文将提出的网络体系结构 (具有动态网络控制层) 与不动态切换MEC-C静态结构进行了比较。图7给出了在不同策略中,SDN-AUVNS中MEC-C和AUV之间的传播延迟的方差。显然,由于动态切换机制,本文提出的方法表现更佳,即传播延迟的方差最小。这也表明本文提出的SDN-AUVNS能够执行精确且协作的系统功能。
图7 控制延迟测试
05
总结
CONCLUSION
总结
本文利用AUV集群跟踪水下污染进行了深入的研究。与已有的方案不同,本文提出利用组网技术,即使用 SDN和MEC技术来提高AUV集群的可扩展性。本文提出了一种具有动态控制平面的SDN-AUVNS模型。SDN-AUVNS将基于AUV集群组网系统划分为网络层、控制层和应用层三个功能层,能够支持集成的、可扩展的组网操作。在提出SDN-AUVNs分层体系结构的基础上,引入多层边缘计算的概念,作为SDN控制器的平台。为了跟踪水下扩散污染的等位线,利用人工势场理论建立了AUV群及其控制模型。同时,采用线性机制对控制信息进行过滤和修正,并设计了联合控制算法。仿真结果表明,该算法能够准确跟踪水下污染。
END
扫描二维码关注我们
==河海大学网络与安全实验室==
微信搜索:Hohai_Network
联系QQ:1084561742
责任编辑:何宇
如有侵权请联系:admin#unsafe.sh