每周文章分享2022.12.05-2022.12.11 标题: Privacy-Preserving Localization for Underwater Sensor Networks via D 2022-12-10 22:15:56 Author: 网络与安全实验室(查看原文) 阅读量:32 收藏
每周文章分享
2022.12.05-2022.12.11
标题: Privacy-Preserving Localization for Underwater Sensor Networks via Deep Reinforcement Learning
期刊: IEEE Transactions on Information Forensics and Security, vol. 16, pp. 1880-1895, 2021.
作者: Jing Yan; Yuan Meng; Xian Yang; Xiaoyuan Luo; Xinping Guan
分享人: 河海大学——夏茹
壹
背景介绍
水下传感器网络(USNs)由大量相互连接的传感器节点组成,能够在给定的水下区域执行协同监测任务。这种联网技术为了解海洋提供了新的机会,可以增强各种应用的监测能力。为了支持这些应用,需要准确的传感器节点位置信息,以便正确分析和解释采样数据。然而,水下介质的开放性和非均匀性使其定位问题的解决更具挑战性。为了对USNs进行精确定位,其他学者也设计了多种水下定位方案,这些方案通常包括以下三个步骤,即信息收集、距离测量和位置估计。
在这三个步骤中,因为相关距离信息被透露给了网络,而且锚节点的位置被输入到定位估计器中,这导致位置信息的泄漏是不可避免的。并且值得注意的是,USNs通常部署在恶劣的环境中,忽视隐私保护会使定位系统容易受到许多攻击。例如,敌人可以很容易地攻击锚节点,并在锚节点的位置信息被获取后破坏整个定位系统。另一个例子是,敌人可以通过将距离测量值与监测区域相关联来推断出传感器节点的位置。因此,在定位过程中,保护锚节点和传感器节点的位置隐私是很有必要的。
贰
关键技术
考虑到水介质的非均匀性,本文提出了一种基于深度强化学习(DRL)的USNs位置隐私保护方案。文章采用信息隐藏技术代替加密技术,开发了一种保护隐私的水下定位协议。对于USNs,本文考虑了一个诚实但好奇的模型,设计了一种射线补偿策略来消除非均匀水介质的影响。在此基础上,采用基于DRL的定位估计方法求出传感器节点的位置。该方法的创新和贡献如下:
1) 位置隐私保护协议。本文在不使用任何加密技术的情况下,本文在保留了锚节点和传感器节点的位置隐私信息的基础之上,开发了一种位置隐私保护的协议来隐藏锚节点和传感器节点的私有位置信息。
2)基于DRL的定位估计器(DRL-Based Localization Estimators)。本文设计了基于DRL的定位估计器,分别考虑了无监督、有监督和半监督三种场景。可以克服局部最优解,获得全局最优解,而且比基于强化学习(RL)的定位估计器具有更快的学习速度。
叁
算法介绍
1. 网络架构
为了实现保护位置的隐私性,本文考虑了一个由三种不同类型的节点组成的网络。
1)表面浮标。水面浮标可以与卫星直接通信,采用全球定位系统(GPS)获取精确的位置信息。假设水面浮标的位置信息不需要保存,其作用是为锚节点提供自定位服务。
2)锚节点。锚节点可以与水面浮标直接通信,通过现有的一些定位方案,锚节点可以进行自定位。锚节点的作用是为传感器节点提供定位参考。
3)传感器节点。传感器节点是静态节点,需要通过与锚节点的交互来估计其位置信息。因此,有必要在定位过程中隐藏传感器节点和锚节点的位置隐私。
在不丧失一般性的前提下,本文假设通过深度单位可以准确测量传感器节点的深度信息,因此需要至少3个非共线锚节点来估计传感器节点在X轴和Y轴上的位置。声速可以建模为
其中b为水面声速,a为与环境相关的标量,z为深度。针对(1),采用射线追踪的方法对任意两个节点之间的声传播进行建模,如图1所示。
图1 非直声传播的描述
2. 对手模型和隐私模型
本文假设传感器和锚节点之间的通信是安全的,即私有信息不会通过通信链路被窃听,可以通过隐蔽传输实现。因此,给出了对手和串通的定义。
定义1(对手模型):如果一个节点与一些节点串通,试图获取另一些节点的位置信息,则该节点可被视为对手。在这种情况下,串通节点可以通过交换其非法信息来计算非串通节点的位置。
定义2(串通):“串通”是指串通节点将彼此共享所有信息,包括自己的信息,如自己的位置和从其他节点接收到的信息。
基于上述定义,在隐私分析中考虑了独立节点和串通节点两种场景。对于第一种场景,一个节点只能通过它接收到的合法信息计算其他节点的位置。对于第二种场景,串通的节点可以建立一个侧通道来揭示关于其他节点的更多信息。为了解决这个问题,本文定义了以下三个级别的位置隐私。
定义3 (Level-1 Privacy):当定位算法结束时,传感器节点j∈IS可估计其位置。但是传感器节点j∈IS或锚节点i∈IA本身无法知道其他节点的位置信息。
定义4 (Level-2 Privacy):当定位算法结束时,传感器节点j∈IS可估计其位置。同时,传感器节点j∈IS或锚节点i∈IA通过与其他节点的串通,可以知道其他节点的位置。
定义5 (Level-3 Privacy):当定位算法结束时,传感器节点j∈IS可估计其位置。但是,传感器节点j∈IS或锚节点i∈IA即使与其他节点串通,也无法知道其他节点的位置。
3. 场景描述
自动水下航行器(AUV)在环境中巡逻,收集不同位置的数据,然后定期将收集到的数据卸载到传感器节点。在这种系统中,本文将收集到的数据命名为“位置标签”,文章中认为位置标签对定位性能有很大的帮助。本文考虑以下三种场景:
S1:所有数据都是无标签的,即传感器节点没有任何位置标签信息,如图2(a)所示。
S2:标签数据占据了大部分环境信息,即传感器节点拥有位置标签上的大部分信息,如图2(b)所示。
S3:未标记的数据占据了大部分环境信息,即传感器节点位置标签上的信息很少,如图2(c)所示。
图2 三种定位场景的概述
4. 本文方案
网络初始后,传感器节点向锚节点发送定位请求。锚节点接收到请求后,记录并回复pseudo位置信息给传感器节点。其中,传感器节点j∈IS与锚节点之间的传输过程如图3所示。
图3 隐私保护传输过程
传感器节点j收集以下信息:
在此之后,本文设计了三种基于DRL的定位估计器来估计xS, j和yS, j(传感器节点的位置)。
(1)当所有数据都没有标签时的定位
在该场景中,传感器节点j∈IS在位置标签上没有任何信息,可以认为是无监督场景。利用深度强化学习(DQN)将定位的过程估计看作是马尔可夫决策过程,采用基于DQN的定位估计器来寻求最优解,其体系结构如图4所示。
图4 基于DQN的定位估计器体系结构
(2)标签数据占多数时的定位
对于场景S2,标签数据占多数,传感器节点j∈IS拥有位置标签上的大部分信息,这种情况可认为是监督场景。显然,基于DQN的估计器并不适合于定位系统,因为环境信息是预先知道的,不需要实现环境探测。对此,DQN的核心技术部分——深度神经网络可以用来估计xS, j和yS, j。具体而言,本文将时间差测量作为DNN的输入,将xS, j和yS, j的估计作为输出。如图5所示,本文使用标记数据来训练DNN,其目的是逼近时差和位置估计之间的非线性映射关系。
图5 基于DNN的定位估计器结构
(3)无标签数据占多数时的定位
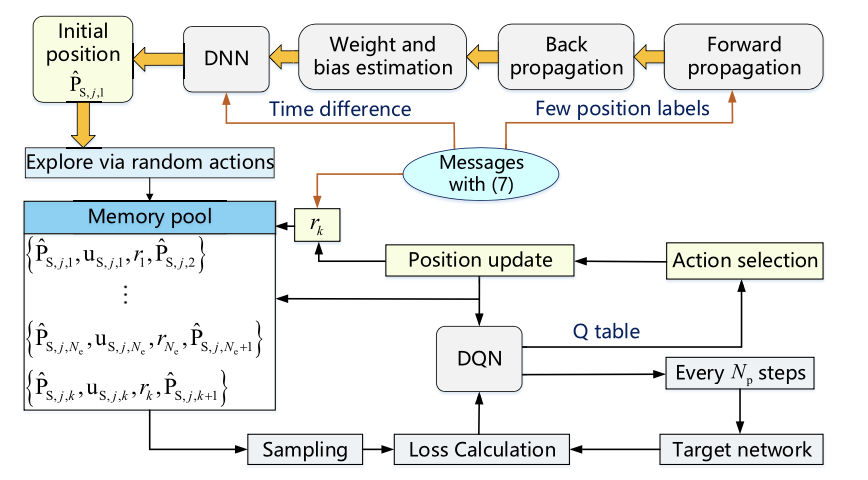
大量的有标签数据并不总是可行的,有必要将无标签数据与有标签数据相结合。受此启发,本文采用半监督DRL估计传感器节点j∈IS的位置信息,即xS, j和yS, j。在此基础上,本文将数据分为两部分,即无标签数据与有标签数据。
有标签数据是传感器节点j∈is预先知道的。无标签数据需要由传感器节点j∈is进行探测。本文采用半监督DRL定位估计器来寻找最优解,其体系结构如图6所示。
图6 半监督DRL定位估计器的描述
肆
实验结果
1.仿真设置
仿真参数: 本节的仿真结果在MATLAB2016a上进行。其中,部署了4个锚节点来定位3个传感器节点。
对比协议:无监督定位估计器、半监督定位估计器、有监督定位估计器
评价指标:收敛速度(向局部最优值逼近的速度)、定位精度
2.结果分析
无监督估计器不需要位置标签。然而,当初始位置与实际位置距离较远时,无监督定位估计器的收敛速度可能较慢。此外,由于初始位置向量是由DNN确定选择的,半监督定位估计器的收敛速度可以非常快。另一方面,有监督定位估计器的收敛速度依赖于位置标签的个数,因此,有监督定位估计器的收敛速度会出现以下两种情况:1)当位置标签个数较小时,有监督定位估计器的收敛速度要快于无监督定位估计器;2)有监督定位估计器的收敛速度比无监督定位估计器慢。为了验证这一结论,如图7(a)和图7 (b)所示。很明显,这些结果与上述结论是一致的。
图7 三种定位估计器收敛速度的比较
监督估计器的定位精度还取决于位置标签的数量。图8 (a)显示了情形1的定位误差。注意到有监督估计器的定位精度并不总是高于无监督估计器的定位精度。情形2的定位误差如图8(b)所示。由图8(b)可知,有监督定位估计器的定位精度始终高于无监督定位估计器的定位精度。由此可知,半监督估计器在收敛速度和定位精度方面优于无监督估计器。
图8 三种定位估计器定位精度的比较
同时,有监督估计器的收敛速度和定位精度取决于位置标签的数量。然而,大量的标记数据并不总是可行的。例如,当标记数据不正确或标记数据数量较少时,可能会大大降低定位性能。为了验证这一结论,在标记数据中加入高斯噪声,定位误差如图9 (a)所示。此外,我们还可以将可用的数据标签数量从46500减少到3300,由此定位误差如图9 (b)所示。这些结果表明,在可用位置标签不占多数的情况下,半监督定位估计器是一种较好的选择。
图9 三种定位估计器定位精度的比较
伍
总结
本文研究了一种基于DRL的USNs位置隐私保护问题。采用信息隐藏技术代替加密技术,在考虑分层效应的基础上,提出了一种位置隐私保护协议,用于在非均匀水下介质中隐藏隐私位置信息。并在此基础上,分别考虑了无监督、有监督和半监督三种情况。对此相应地开发了三种基于DRL的定位估计器来定位传感器节点,保护了锚节点和传感器节点的位置隐私,维护了海洋环境的秩序。
-END-
==河海大学网络与安全实验室==
微信搜索:Hohai_Network
联系QQ:1084561742
责任编辑:何宇
如有侵权请联系:admin#unsafe.sh