团队科研成果分享2023.06.05-2023.06.11标题: A Scheme for Cooperative-Escort Multi-Submersible Intelligent Trans 2023-6-11 06:0:58 Author: 网络与安全实验室(查看原文) 阅读量:56 收藏
团队科研成果分享
2023.06.05-2023.06.11
标题: A Scheme for Cooperative-Escort Multi-Submersible Intelligent Transportation System Based on SDN-Enabled Underwater IoV
期刊: IEEE Transactions on Intelligent Transportation Systems, 2023
作者: Qiuzi Tao, Guangjie Han, Chuan Lin, Lei Wang, Shuqiang Huang, and Chang Lu.
分享人: 陶秋子
01
研究背景
BACKGROUND
研究背景
由一组自主水下航行器(AUV)和载人航行器(HOV)组成的多潜器系统被视为未来水下探索的框架可能的发展方向。在这项工作中,为了提高多潜器编队的互操作性和通信效率,我们将多潜器系统视为水下车联网 (IoV) 的范例,并展示如何利用软件定义网络 (SDN) 技术来优化系统架构。借助SDN同时考虑洋流因素,我们提出了人工流势场算法,该方法将人工势场算法与梯度下降算法相结合,为多潜器系统规划路径。为了提高路径规划的安全性和效率,我们提出了一种基于双领导者-跟随者算法的护航编队避障机制,用于处理不同类别的避障情况。
02
关键技术
TECHNOLOGY
关键技术
本文利用SDN技术来提高系统的控制和信息同步能力,并提出了一种基于SDN的多潜器协同护航编队路径规划方案。
本文的主要贡献可以总结如下:
1)我们为多潜器护航系统(一组AUV护航一艘HOV)提出了一种支持SDN的网络架构,该架构将网络系统划分为三个功能层,实现实时信息感知/同步和系统控制;
2)我们考虑了洋流模型,并提出了一种基于流体力学中势流场、人工势场算法和梯度下降算法的路径规划方案,以适应实际的水下情况。所提出的路径规划算法可以处理洋流遇到障碍物引起的流场变化的细节,并在人工势场算法中做出相应的调整;
3)我们提出了一种基于双领导者-追随者算法的护航编队避障机制,该机制可以在保持原始编队的同时处理多种类型的避障情况。
03
算法介绍
ALGORITHMS
算法介绍
1. 基于SDN的网络框架
我们提出的基于SDN的多潜器IoV网络如图1所示,它可以分为三层:应用层、控制层和基础设施层。
图1 基于SDN的多潜器IoV网络框架
(1)应用层:应用层的目标是定义统一的应用接口,并向控制层提出相应的控制要求。HOV控制AUV完成相应的水下作业相关任务,如多个AUV护航编队的编队和转换;HOV控制多AUV协同护航的水下路径规划任务;以及相关应用,如HOV通过多AUV感知周围更大的海域。
(2)控制层:我们将控制层分为主控制层和本地控制层。主控制层主要由HOV组成,在网络框架中承担统计上传事件和发布规则的作用。它主要负责感应相关每个AUV的状况,并收集它们获得的海域数据。协调每个AUV,然后实现相关应用,如路径规划、编队控制和海域勘探。同时,HOV与相应的母船进行通信,使母船能够获得相应的水下全局信息。局部控制层由AUV编队选择的先导AUV组成,主要与主控层的HOV协同完成相应的编队控制和编队维护。当编队因穿越障碍物而失去与HOV的接触时,它发挥着不可替代的作用。
(3)基础设施层:该层由形成相应AUV编队的AUV组成。每个AUV都有一个相应的移动节点。形成的主要目的是保护HOV。当HOV正常航行或受到一定威胁时,编队将根据HOV的指令实时调整其位置和相应状态,并对HOV实施有效保护。在正常执行水下任务时,AUV会根据HOV的指令执行并完成相应的任务,并将数据传输给HOV,即帧中的控制器。图1中AUV编队中的半透明AUV表示局部控制层的领导者AUV。
图2 软件定义信标方案
图2a显示了在网络形成的初始阶段,HOV与编队中的AUV同步基本信息的通信过程。HOV将向编队中的每个AUV发送SYN Requist消息,以请求信息同步。在接收到消息后,编队中的AUV将以SYN回复消息的形式向HOV发送其AUV ID、AUV地址、深度、速度、通道、方向、盐度、温度、能量、健康状况和其他关键信息。图2b显示,在HOV收集到有关编队中AUV的各种信息后,母舰将向相应的HOV发送SYN Requist消息以请求同步。HOV收到消息后,会将整个编队(编队由HOV和多个AUV组成)的编队速度、编队方向、编队持续时间、编队深度、能量、编队健康状况等关键信息作为SYN回复消息发送到母舰。图2c显示了HOV主动或收到AUV的请求后向AUV发出指令的过程。AUV将向HOV发送操作请求消息,HOV将向AUV提供一些关键信息,例如:巡航速度;巡航方向;巡航持续时间;巡航深度;以及采取行动答复形式的应急措施。
2. 路径规划算法
我们使用z坐标三维流场模型来描述海洋,这是一种三维流场划分模型。我们根据z轴把海洋分成M层。如图3所示,任意点的海流用um表示,箭头指向海流方向。这样,我们就把整个三维流场看作是多个二维流场的垂直叠加。
图3 z坐标三维流场模型示意图
考虑到洋流遇到障碍物时会改变方向,我们将讨论洋流遇到障碍物的情况。假设m层流场中存在圆形障碍物,其在海流方向上的横截面半径为r,以平面海流方向为x轴正方向建立平面直角坐标系。我们选取流体力学中的共偶极子与均匀流动的复势进行叠加,得到速度势函数如下:
通过在斥力势场函数中加入预测距离和调整因子,可以避免潜水器编队与障碍物的碰撞,同时可以避免到达目标,避免局部最小值。
同时引力场部分通过预测驱动方向与海流的关系,可以稳定潜水编队的速度,避免编队运行过快的危险z坐标三维流场模型示意图如图4所示。
图4 基于改进力场的潜水地层受力分析
最后由流场引力势场和斥力势场合成总势场用梯度下降的方法进行求解。
3. 避障机制
如果频繁地有改变编队的命令,由于诸如水下噪声、人为操作和其他问题的因素,将会发生编队不稳定。面对这些问题,本文也进行了改进。提出了双领导者模式下基于三角金字塔结构的护航编队控制模型。
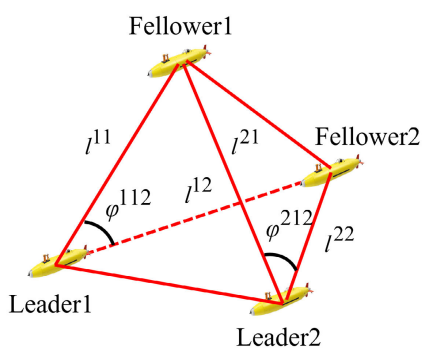
我们建立双领导者算法有两个考虑。首先,由于编队中有两个领导者,该算法便于AUV编队因障碍物或环境原因断开后的断开重组。第二个由三棱锥的几何性质组成。根据三棱锥结构的特点选择两个顶点,可以保证两个顶点到达任意顶点;我们只需要穿过一个三棱锥的边长。通过这个特性,我们可以保证在通过障碍物时,两个自主潜水器的领导者能够在深潜器编队中顺利地相互接触。在编队中,如果选择两个AUV作为领导者,并确定作为领导者的两个AUV之间的距离,这四个AUV将形成一个独特的三棱锥结构,如图5所示。
我们使用了相对角度和相对距离对模型进行了控制公式如下:
图5 AUV编队结构示意图
同时我们考虑了三种避障情况。
情况1:HOV确定它可以通过改变编队角度γ来避开障碍物。这样,由AUV组成的三棱锥编队将在HOV的控制下,按照十二面体运动模型的规律和上文公式中的数学方法改变角度,实现高效避障。避障过程如图所示6a。γ对齐因子表示十二面体移动模型的旋转数。
情况2:HOV确定在三棱锥编队中的AUV之间的相对距离l可以通过上面的编队控制公式减小,用于避障。从图1中的通信架构可以看出,HOV将控制整个AUV编队。领头的水下机器人将控制跟随的水下机器人。他们将使用编队控制公式来缩短相对距离l。避障过程如图6b所示。在此期间,HOV的速度保持不变,AUV编队中的4个AUV相应加速或减速,以快速调整到相应位置。
情况3:HOV决定它必须使用公式(16)来扩展水下机器人以三棱锥队形避开障碍物。根据图1所示的通信框架,由自主式潜水器组成的三棱锥编队将处于HOV的控制之下。此外,两个领导者AUV控制跟随AUV根据编队控制公式减小相对距离l。避障过程如图6c所示。在此期间,HOV的速度保持不变,AUV编队中的4个AUV相应地加速或减速,以快速调整到相应的位置。
图6 三棱锥编队避障示意图
04
实验结果
EXPERIMENTS
实验结果
1.实验结果
我们分别对路径规划的实现过程,路径规划算法的能量消耗进行了测试,实验结果如图7-8所示。
图7 多潜器编队路径规划及避障实现
图8 路径规划算法的能量消耗
我们对编队通过旋转放大缩小的情况进行仿真,如图9、11、13,并对它们对应的通讯情况进行仿真,如图10、12、14所示。
图9 护航编队路径规划及避障侧视图
图10 护航编队的路径规划及传输时间
图11 护航编队路径规划及避障编队队形缩小侧视图
图12 护航编队队形缩小方案传输时间
图13 护航编队的路径规划和避障编队队形放大侧视图
图14 护航编队队形放大方案传输时间
05
总结
CONCLUSION
总结
本文提出了一种水下机器人智能运输方案,其中潜水器相互协作执行水下作业。为了便于编队通信,我们使用网络理论将多潜器系统升级为水下IoV的范例。引入SDN技术将多潜器系统划分为三个功能层,使编队能够实现稳定的信息传输/同步和有效的系统控制。为了规划多潜器系统的路径,提出了一种基于人工势流场理论的考虑海流因素的路径规划算法。注意,在所提出的路径规划方案中还考虑了编队避障,并且提出了用于多潜器编队的自适应编队避障机制,其中考虑了不同类别的避障情况。仿真实验表明,该方案在多潜器数据传输中表现较好,在多潜器编队控制中具有较高的稳定性。特别地,所提出的路径规划算法能够以较低的能量消耗为多潜器系统(一组AUV护航下的HOV)提供精确的路径调度。并且可以支持可扩展的水下避障。
END
扫描二维码关注我们
==河海大学网络与安全实验室==
微信搜索:Hohai_Network
联系QQ:1084561742
责任编辑:何宇
如有侵权请联系:admin#unsafe.sh