2024-8-2 21:0:14 Author: hackernoon.com(查看原文) 阅读量:4 收藏
Authors:
(1) Cody Rucker, Department of Computer Science, University of Oregon and Corresponding author;
(2) Brittany A. Erickson, Department of Computer Science, University of Oregon and Department of Earth Sciences, University of Oregon.
Table of Links
Abstract and 1. Context and Motivation
- Physics-Informed Deep Learning Framework
- Learning Problems for Earthquakes on Rate-and-State Faults
- 2D Verification, Validation and Applications
- Summary and Future Work and References
2. Physics-Informed Deep Learning Framework
The physics governing motion in many applications in science and engineering give rise to partial differential equations (PDE) where analytic solutions can be difficult to obtain (due, e.g. to complex material properties, boundary conditions, geometry) and we commonly turn to numerical methods. The Physics-Informed Neural Network (PINN) is a deep learning (DL) framework for approximating solutions to PDEs. Though this DL framework lacks the robust mathematical theory of the traditional methods, it shows particular promise in solving problems for which traditional numerical methods are ill-suited[43]. The DL framework produces a closed, analytic form for the solution, which is continuous and defined at every point in the domain allowing one to evaluate the solution “off-grid” without having to resolve the PDE (i.e. it is mesh-free) [43]. In addition, both forward and inverse problems can be solved in the same computational setting, as will be shown in subsequent sections.
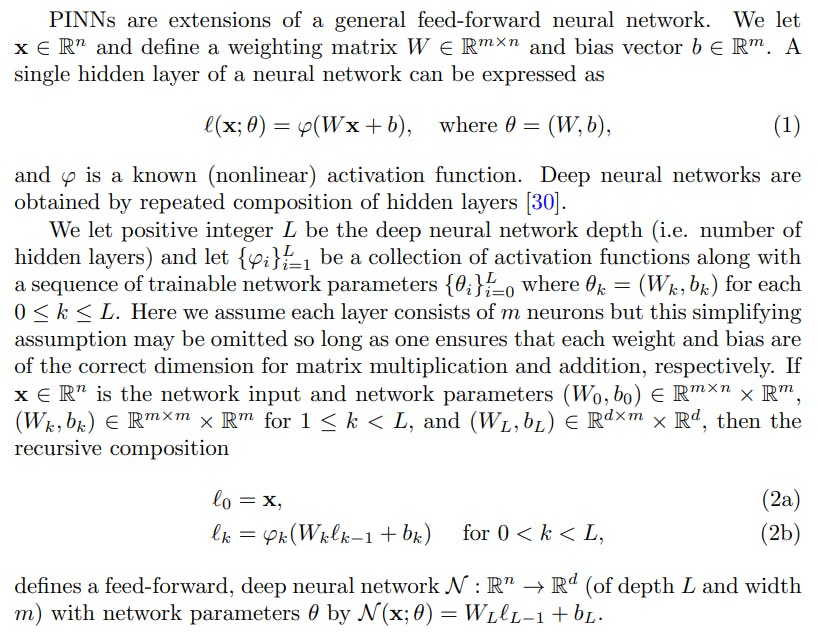
2.1. Feed-forward Deep Neural Networks

2.2. PINN Architecture
The PINN architecture is defined by extending the feed-forward deep neural network to enforce physical conditions set by an initial-boundary value problem (IBVP). For simplicity in the notation (as well as generality) we define this extension for a general IBVP, with specific details for our application given in the subsequent section. Consider the general operator form of an IBVP given by


如有侵权请联系:admin#unsafe.sh