
I’m happy to announce, after quite some time, the new bettercap 2.4.0 major release. Other than including a plethora of long due fixes (additionally to what the recent 2.33.0 already fixed), it also packs a few new functionalities that extend its reach to car and industrial control system hacking. It’ll possibly take me some time to update the documentation on the official website so I’m here today to write a bit about the new features. Also remember that you can use the help, help ui, help can and help wifi commands to check all the new options and added functionalities.
Car and ICS hacking with the new CAN module
One of the protocols that always fascinated me but that I never really approached other than attending conference talks about it is CAN-bus. There are plenty of resources to get you started with it so I’m not going too much into the details of it or the related attacks. The bottom line is that CAN-bus is a protocol used inside cars and some ICS that some components use to communicate diagnostics to the rest of the system. Everything is broadcasted, most of it is in the clear, there’re a multitude of attacks that can be performed, it’s a mess.
From a security researcher perspective however, other than the very basic ones inside the can-tools package, there’s not a single decent tool oriented to security. Most people end up writing their own python code that only works for that specific scenario or only showcases a specific attack.
So the new CAN module is an attempt to create a framework for this research that we can all easily access and use. Specifically, the new module can interact with any CAN-bus hardware that supports socketcan (if there’s also interest in CAN-bus over serial let me know and I’ll do my best to integrate it) and allows to:
Read, write and fuzz raw frames
The very basic of CAN-bus functionalities. Set your device and enable the module to start reading raw frames:
1 | set can.device /dev/can0 |
You can also load and replay a dump previously captured with candump:
1 | set can.dump obd2-candump-2023-11-22_031813.log |
Inject raw frames as id#hex-data:
1 | can.inject 0#aabbccddee |
Or generate random ones for fuzzing with can.fuzz id size:
1 | can.fuzz ff 8 |
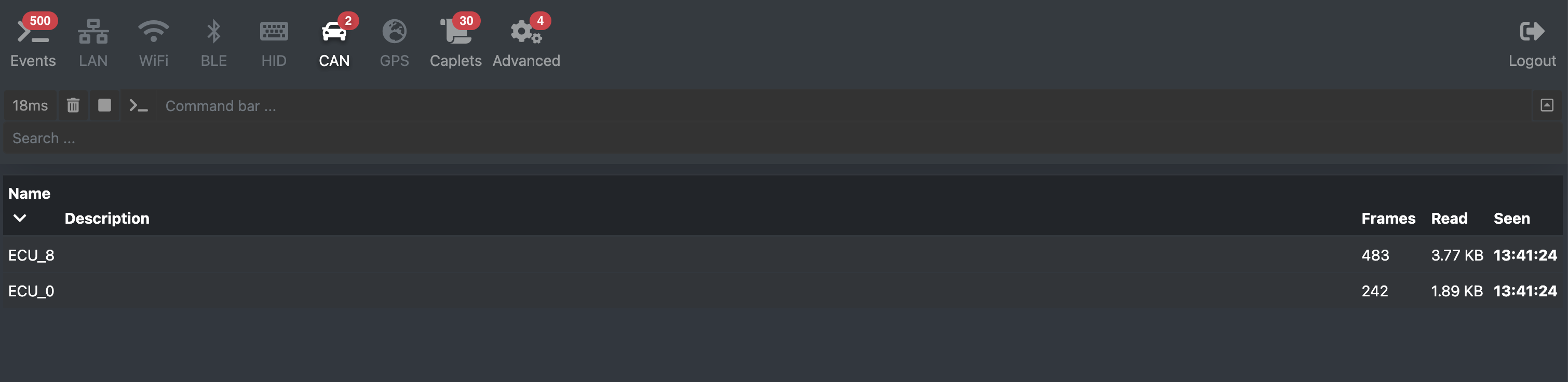
And show a list of the detected ECUs:
1 | can.show |
Load your own DBC files, decode traffic and fuzz with them
You can also use CAN-bus database files that describe a specific protocol, in which case bettercap will use it to automatically parse every frame on the bus (css-electronics and comma.ai have some very good ones):
1 | set can.device /dev/can0 |
When running with a DBC, you’ll also be able to use use it for fuzzing. For instance, to generate a specific message given its id, with randomized content:
1 | can.fuzz 12 |
To instead pick a random message from a specific ECU and generate its contents randomly:
1 | can.fuzz ECU_name |
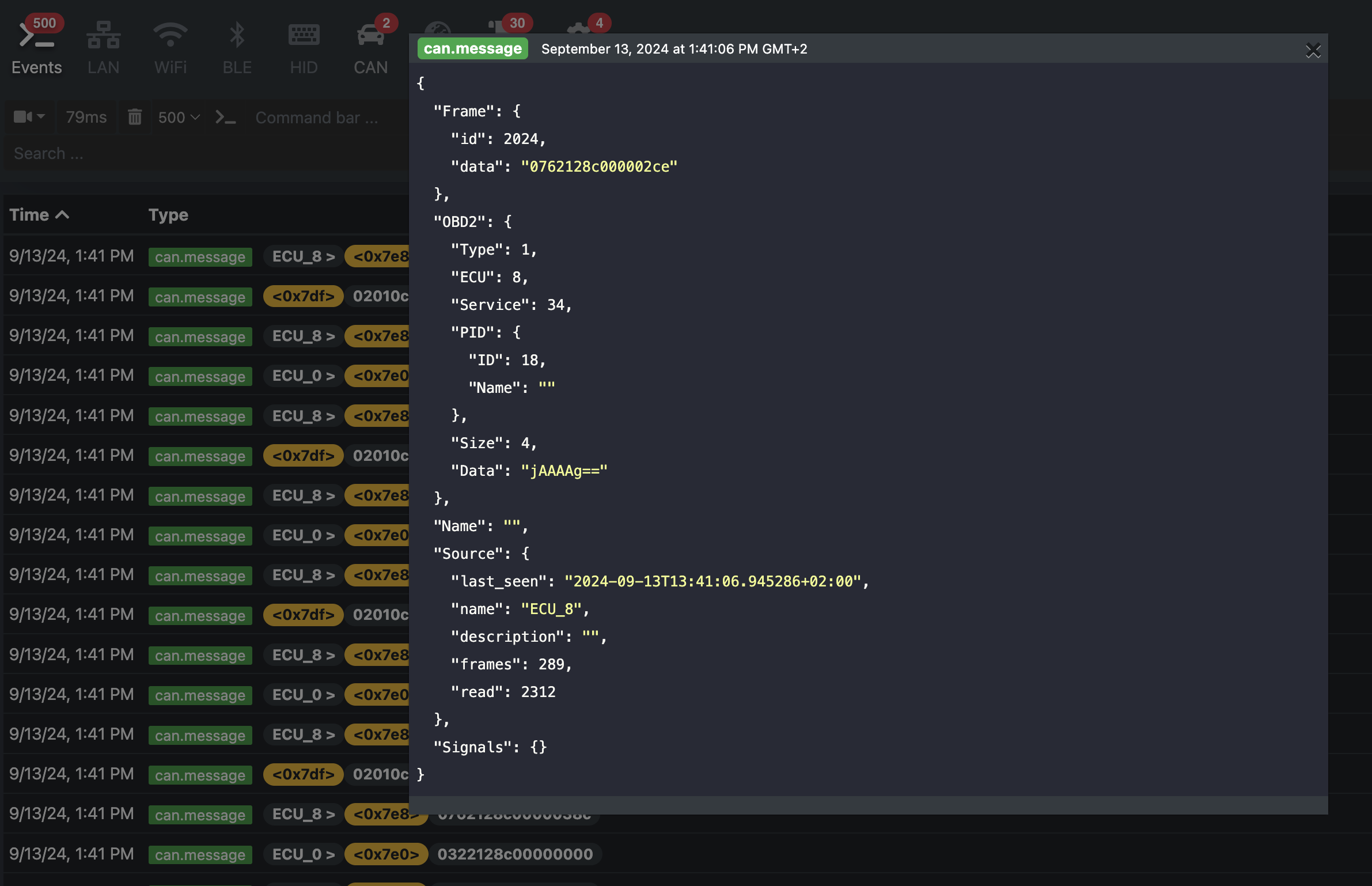
Decode OBD2 PIDs with builtin decoder
Alternatively to using a DBC, if you work with ODB2 standard PIDs, you can just enable the builtin PID parser:
1 | set can.device /dev/can0 |
For the first iteration of the CAN module this is all. I’m sure that many new features will be added in the future and many integrations with the builting scripting engine (the module can already be scripted).
Now to the WiFi :D
Wireless low-hanging fruits with the new WiFi bruteforcer
A while back a user created a github issue with a very smart feature request: since many routers and printers have very simple wifi passwords, it is reasonable to expect that a wordlist based attack might be more successful at times than capturing and cracking the handshake.
So now we have wifi.bruteforce, that works wonderfully on both macOS and Linux:
1 | set wifi.interface en0 |
Builtin Web UI
Due to a series of issues with how Kali linux packaged bettercap’s webui, many users had a lot of troubles making it work correctly. Now the web ui is not something you have to download separately anymore, but it’s integrated as a module and all you have to do is:
1 | ui on |
Obviously the CAN module is already integrated with it. I hope this makes things easier :D
A final note about BLE and precompiled binaries
I’m also rewriting the BLE module, but this will take some more time as I’m trying to make it work in a stable way for every supported operating system, which is everything but simple :D
Precompiled binaries will soon be uploaded to the github repo, meanwhile you can use the docker image or compile from source (compilation with make has been fixed too).
Stay tuned and as usual enjoy!